Исследование космоса за пределами околоземного режима было одним из самых сложных и увлекательных начинаний человечества, которое продолжает захватывать воображение поколений.
На протяжении многих веков несколько космических государств выполняли многочисленные миссии для исследования большинства планет Солнечной системы, их природных спутников, разных малых планет/астероидов, комет и даже межпланетных путешествий. Луна и Марс являются наиболее исследованными и относительно более переполненными планетными телами в настоящее время. В ближайшие несколько лет ожидается более интенсивная деятельность вокруг Луны из-за возобновления интереса к исследованию Луны, провозглашенное миссиями Artemis для возвращения на Луну и подготовкой к колонизации Марса. В то время как предыдущие миссии были в основном направлены на научные исследования, будущие миссии, вероятно, будут привлекать многих участников с разными интересами, включая те, которые главным образом руководствуются использованием ресурсов в коммерческих целях. Необходимо лучшее понимание окружающей среды, чтобы сформулировать разумные методы смягчения последствий во избежание угрозы близкого сближения на планетарных орбитах.
Текущие Руководящие принципы предотвращения образования космического мусора ООН и Межагентского координационного комитета по космическому мусору (IADC) применяются к космическим кораблям и орбитальным степеням, «которые будут выведены на орбиту Земли». В настоящее время космический мусор представляет серьезную угрозу долгосрочной устойчивости космической деятельности на все более загруженных околоземных орбитах. Поэтому, основываясь на уроках, усвоенных при работе в околоземном режиме, интересно и желательно проводить исследования, связанные с близкими сближениями, учитывая увеличение количества объектов на лунных орбитах.
Отслеживание объектов далекого космоса
Наблюдение и отслеживание глубококосмических объектов по своей сути сложнее, чем в околоземном режиме, главным образом из-за огромного расстояния между объектом и наблюдателем, что вносит значительную задержку, ослабление сигнала и связанные с этим осложнения. Функциональные активы, такие как космические корабли/посадочные аппараты/марсоходы, отслеживаются активными и пассивными средствами. Типичные активные методы включают измерение дальности и доплеровское измерение, интерферометр с очень длинной базовой линией (VLBI)/дельта-дифференциальную одностороннюю локацию (DOR) и лазерную локацию с помощью ретрорефлекторов. Оптические транспондеры также были продемонстрированы для таких миссий как Messenger, Mars Global Surveyor и Hyabusa-2, которые могут обеспечить лучшую точность.
Лунные орбиты
На орбитальную эволюцию на орбите Луны в первую очередь влияют лунная гравитация, гравитация Солнца и Земли и давление солнечной радиации. Для орбит ниже 500 км доминирует неравномерность лунной гравитации из-за концентрации массы, что вместе с возмущениями третьего тела Землей и Солнцем вызывает увеличение эксцентриситета орбиты. В результате перилунная высота постепенно снижается, что приводит к возможному столкновению с лунной поверхностью. К примеру, ожидаемое время жизни космического корабля на круговой орбите 100 км составляет около 160 дней.
Основные типы лунных орбит включают гало-орбиту вокруг точки Лагранжа, почти прямолинейную гало-орбиту (NRHO), низкую лунную орбиту (LLO) и удаленную ретроградную орбиту (DRO). Орбиты NRHO предлагают такие преимущества, как стабильность и потребность в меньшем обслуживании орбиты, поддержании непрерывной связи с Землей и другими кораблями на орбите Луны, избегание затемнений и т.п., и очень подходят для размещения лунных шлюзов. Несколько будущих миссий также могут быть размещены на подобных орбитах, но, учитывая огромную пространственную протяженность таких орбит (намного больше пояса GEO), в ближайшем будущем не ожидается скопление. Большинство лунных зондов, находящихся сейчас на орбите, работают в LLO.
Текущая ситуация вокруг Луны
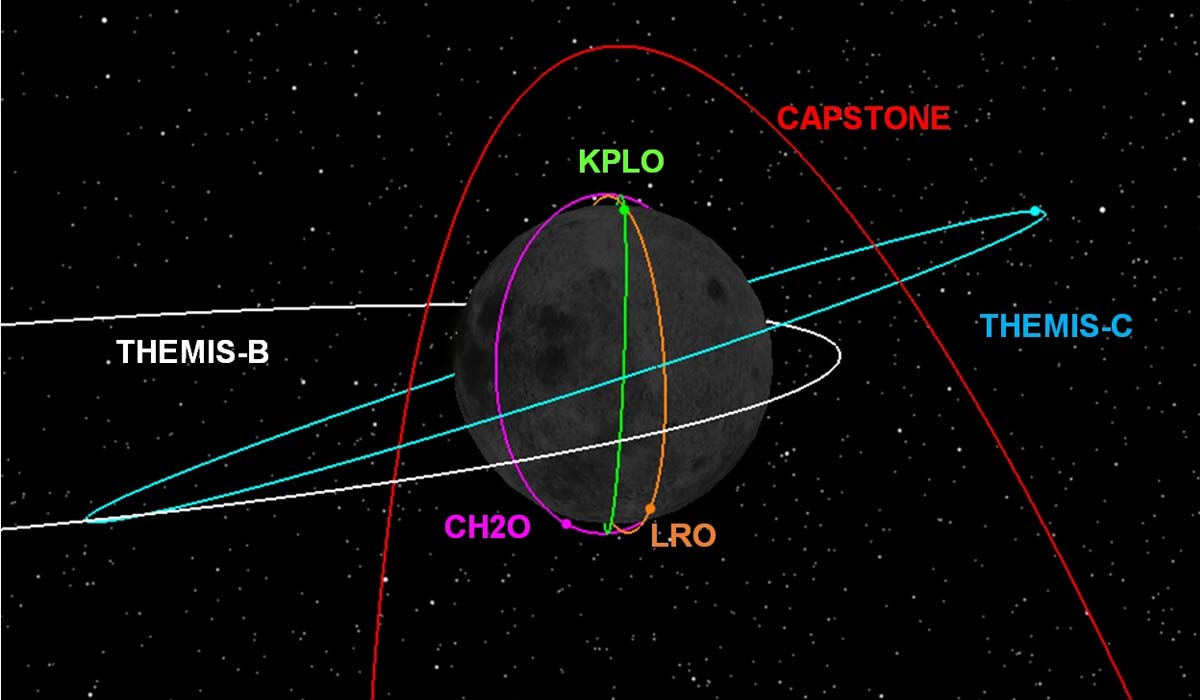
По состоянию на июль 2023 года существует 6 активных окололунных аппаратов. Два из пяти зондов миссии NASA THEMIS были перепрофилированы в рамках ARTEMIS (ускорение, повторное соединение, турбулентность и электродинамика взаимодействия Луны с Солнцем) как ARTEMIS P1 и ARTEMIS P2, оба работают на эксцентричных орбитах с низким наклоном. NASA Lunar Reconnaissance Orbiter (LRO) вращается вокруг Луны по почти полярной, слегка эллиптической орбите. Chandrayaan-2 (CH2O), вторая лунная миссия ISRO, и Korea Pathfinder Lunar Orbiter (KPLO) также работают на полярных орбитах на высоте 100 км. NASA Capstone работает в резонансном южном L2 NRHO 9:2, его перилун проходит над северным полюсом Луны на высоте 1500-1600 км, тогда как аполун находится над южным полюсом на расстоянии почти 70 000 км.
Японский космический корабль Ouna, выведенный на орбиту Луны в рамках миссии Kaguya/SELENE в 2009 году, и Chandrayaan-1, запущенный в 2008 году, являются двумя недействующими космическими аппаратами. Все остальные орбитальные аппараты были либо выведены из орбитального режима, связанного с Луной, либо совершили посадку/столкновение с поверхностью Луны, либо намеренно, либо потому, что они не совершили мягкую посадку. К примеру, спутник ретрансляции данных Queqiao миссии Chang'e 4, запущенный Китаем в мае 2018 года, позже был переведен на гало-орбиту вблизи точки L2 Земля-Луна.
В настоящее время единственным рабочим луноходом является китайский аппарат Yutu-2, прибывший на Луну во время миссии Chang'e 4. По имеющимся источникам СМИ, ожидается, что российский космический аппарат «Луна-25» с посадочным модулем и марсоходом окажется на лунной орбите 100 км до 16 августа и совершит посадку на южном полюсе Луны до 21-23 августа 2023 года.
| Миссия | Страна / Организация | Год запуска | Тип |
|---|---|---|---|
| Луна-25 | Russia | 2023 | Посадочный модуль |
| Commercial Lunar Payload Services (CLPS) | USA | 2023 | Программа NASA по доставке коммерческой полезной нагрузки |
| Lunar Trailblazer | USA | 2023 | Орбитальный аппарат |
| Beresheet 2 | Israel | 2024 | Орбитальный аппарат / посадочный модуль |
| VIPER (Volatiles Investigating Polar Exploration Rover) | USA | 2024 | Луноход |
| Artemis II | USA | 2025 | Посадочный модуль |
| China's Lunar Exploration Programme (CLEP): Chang'e 6,7,8 | China | 2024-2027 | Лунная роботизированная исследовательская станция |
| China's lunar communication and navigation сатиллитный конституция | China | 2023 | Спутники связи |
| Hakuto-II и III | Japan | 2024-2025 | Орбитальный аппарат / посадочный модуль |
| SLIM (Smart Lander for Investigating Moon) | Japan | 2023 | Орбитальный аппарат / посадочный модуль |
| LUPEX (Lunar Polar Exploration Mission) | India/Japan | После 2024 | Орбитальный аппарат / посадочный модуль / ровер |
Риск близкого сближения на лунных орбитах и его уменьшение
Даже с небольшим количеством орбитальных космических аппаратов, LRO, KPLO и CH2O, их орбитальные режимы в окололунном пространстве часто сближаются. Иногда такие сближения даже требуют выполнения маневров во избежание столкновений, чтобы быть более безопасными из-за неопределенности, связанной с оценками орбиты. К июлю 2023 года Чандраян-2 выполнил три маневра избегания столкновений, чтобы смягчить критические близкие сближения с LRO и KPLO. Примечательно, что между агентствами происходит эффективная координация во избежание критических соединений на орбите Луны. Ожидается, что для миссии Chandryaan-3 (CH3) двигательный модуль будет вращаться вокруг Луны по круговой LLO на высоте около 150 км в течение многих последующих лет. Большинство посадочных аппаратов на Луну также, вероятно, будет временно находиться в LLO (обычно в течение нескольких дней или недель) перед посадкой.
В рамках системы ISRO для безопасного и устойчивого управления космическими операциями (IS4OM) выполняется критический анализ каждого из лунных маневров для снижения орбиты, чтобы оценить потенциальные риски близкого сближения с другими лунными орбитальными аппаратами перед выполнением маневров.