Китай активно развивает свои концепты китайских роботов на Луне, которые станут частью будущей инфраструктуры Лунной базы и автоматической поддержки роботизированного освоения Луны в рамках национальной программы исследования спутника Земли. Новые разработки включают как универсальных помощников для строительных и научных задач, так и специализированные автономные системы для разведки, передвижения по пересечённой поверхности и выполнения сложных операций.
Универсальные и многофункциональные роботы для лунной базы
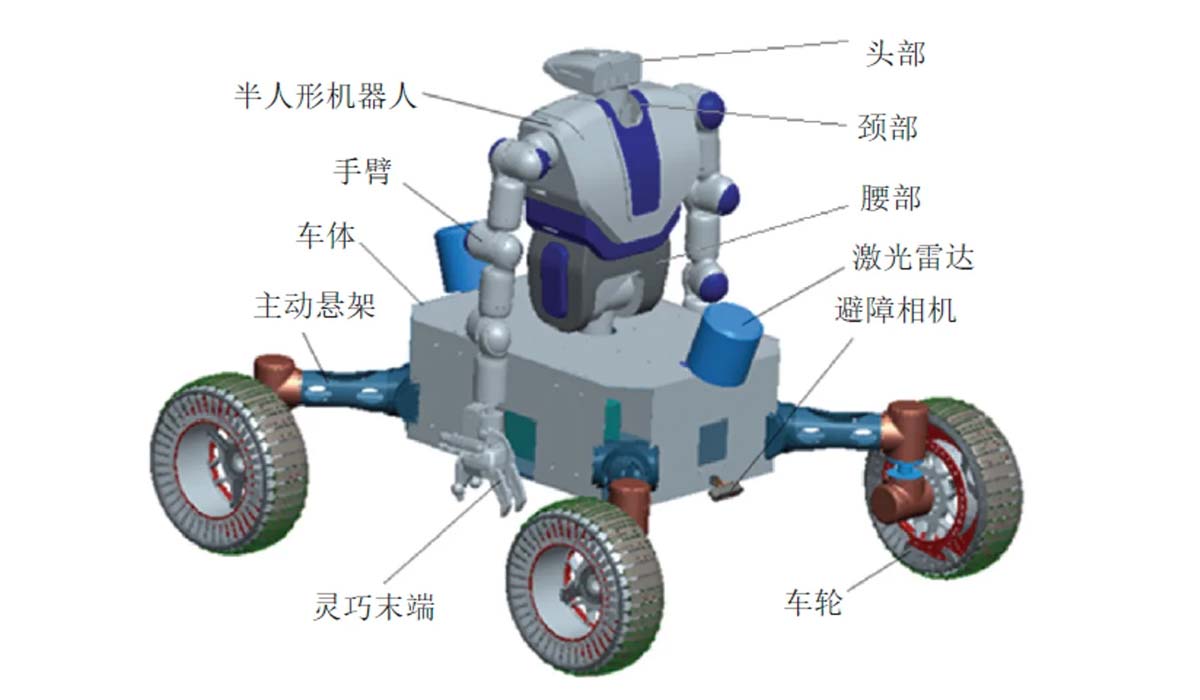
Одним из самых обсуждаемых проектов стал полу‑гуманоидный робот на колёсной платформе, предложенный исследователями из Beijing Institute of Spacecraft System Engineering. Этот робот сочетает мобильность с ловкостью человека, способен перемещаться по поверхности Луны и выполнять широкий спектр задач — от строительства и технического обслуживания оборудования до проведения научных экспериментов, отбора и анализа образцов реголита. Такой подход к проектированию колёсной платформы с активной подвеской обеспечивает большую скорость и устойчивость по сравнению с шагающими роботами.
Конструктивно робот оснащён талией с большим диапазоном вращения и манипулятором с несколькими степенями свободы для точной работы с инструментами, что делает его потенциально ключевым участником инженерных операций на будущей Международной лунной исследовательской станции (ILRS). Как сообщила команда разработчиков в декабрьском номере журнала Journal of Deep Space Exploration, в талии робот может поворачиваться примерно на 180 градусов в обе стороны и наклоняться вперед до 90 градусов, а его подвижная кисть имеет четыре степени свободы, что позволяет выполнять точные манипуляции.
«По сравнению с двуногой ходьбой, колесная активная подвеска обеспечивает более быстрое и стабильное передвижение, предоставляя устойчивую платформу для работы верхней части корпуса», — пояснили исследователи. — «Китайские луноходы «Юйту» и марсоход «Чжужун» также использовали колесное шасси».
Колеса робота будут изготовлены из металлической сетки с протектором из стальной проволоки, что сделает их легкими и прочными, обеспечивая при этом гибкость, амортизацию и надежную работу в условиях экстремального холода. Это позволит аппарату без проблем преодолевать большие расстояния по пересеченной лунной местности.
На данный момент проект находится на стадии концептуальной разработки. О конкретных сроках создания прототипа или планах испытаний в условиях, близких к лунным, пока официальных сообщений нет.
Роботы для освоения планет
Помимо гуманоидов, китайские исследователи разрабатывают и другие роботизированные платформы. Например, команды из Peking University тестировали роботизированных «собак», способных автономно обходить препятствия, строить 3D‑карты и выполнять разведывательные задачи в условиях, имитирующих лунные пещеры. Эти роботы особенно полезны для исследования труднодоступных или потенциально опасных областей, которые могли бы стать участками будущих работ по роботизированному освоению Луны.
В рамках программы автоматических миссий Chang’e Китай планирует использование нескольких роботизированных аппаратов для различных функций. В миссии Chang’e‑7, запланированной на середину 2020‑х годов, будет использоваться прыгающий робот (hopper), способный исследовать кратеры на южном полюсе Луны и искать водяные ресурсы, а также крупный ровeр для перемещения по поверхности.
В перспективе миссии Chang’e‑8 ожидается размещение ещё более продвинутых роботов, включая мультифункциональные платформы, способные поддерживать научные инструменты, инфраструктуру и автономные операции в складных условиях на Луне. Частью этой инициативы станет проект Hong Kong Operation Robot, разработанный при участии Hong Kong University of Science and Technology и ориентированный на комплексные задачи обслуживания и монтажа оборудования на поверхности.
Роботы становятся незаменимыми помощниками человека в условиях, где опасно или неэффективно работать напрямую. Они становятся частью более широкой стратегии по «роботизированному освоению Луны», включающей различные автоматизированные аппараты для строительства и эксплуатации базовых инфраструктурных систем. В рамках плана по созданию Лунной базы, которую Китай планирует завершить к 2035–2050 годам, роботизированные системы станут ключевыми элементами подготовки территории, строительства баз, обслуживания оборудования и исследования ресурсов.