Китай активно розвиває свої концепти китайських роботів на Місяці, які стануть частиною майбутньої інфраструктури Місячної бази та автоматичної підтримки роботизованого освоєння Місяця в рамках національної програми дослідження супутника Землі. Нові розробки включають як універсальних помічників для будівельних і наукових завдань, так і спеціалізовані автономні системи для розвідки, пересування пересіченою поверхнею та виконання складних операцій.
Універсальні та багатофункціональні роботи для місячної бази
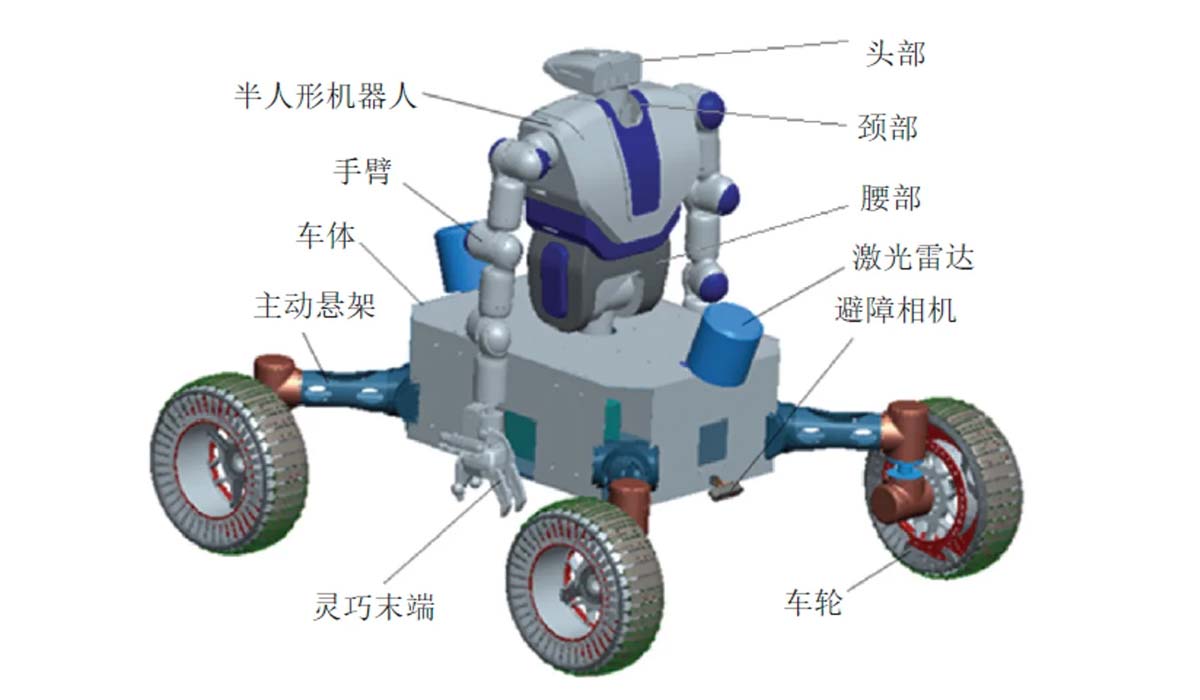
Одним із найбільш обговорюваних проєктів став напівгуманоїдний робот на колісній платформі, запропонований дослідниками з Beijing Institute of Spacecraft System Engineering. Цей робот поєднує мобільність зі спритністю людини, здатний переміщатися поверхнею Місяця та виконувати широкий спектр завдань — від будівництва та технічного обслуговування обладнання до проведення наукових експериментів, відбору та аналізу зразків реголіту. Такий підхід до проєктування колісної платформи з активною підвіскою забезпечує більшу швидкість і стійкість порівняно з крокуючими роботами.
Конструктивно робот оснащений талією з великим діапазоном обертання та маніпулятором з кількома ступенями свободи для точної роботи з інструментами, що робить його потенційно ключовим учасником інженерних операцій на майбутній Міжнародній місячній дослідницькій станції (ILRS). Як повідомила команда розробників у грудневому номері журналу Journal of Deep Space Exploration, у талії робот може повертатися приблизно на 180 градусів в обидві сторони і нахилятися вперед до 90 градусів, а його рухома кисть має чотири ступені свободи, що дозволяє виконувати точні маніпуляції.
«Порівняно з двоногою ходьбою, колісна активна підвіска забезпечує швидше та стабільніше пересування, надаючи стійку платформу для роботи верхньої частини корпусу», — пояснили дослідники. — «Китайські місяцеходи «Юйту» та марсохід «Чжужун» також використовували колісне шасі».
Колеса робота будуть виготовлені з металевої сітки з протектором зі сталевого дроту, що зробить їх легкими та міцними, забезпечуючи при цьому гнучкість, амортизацію та надійну роботу в умовах екстремального холоду. Це дозволить апарату без проблем долати великі відстані пересіченою місячною місцевістю.
На даний момент проєкт перебуває на стадії концептуальної розробки. Про конкретні терміни створення прототипу або плани випробувань в умовах, наближених до місячних, поки офіційних повідомлень немає.
Роботи для освоєння планет
Окрім гуманоїдів, китайські дослідники розробляють й інші роботизовані платформи. Наприклад, команди з Peking University тестували роботизованих «собак», здатних автономно обходити перешкоди, будувати 3D-карти та виконувати розвідувальні завдання в умовах, що імітують місячні печери. Ці роботи особливо корисні для дослідження важкодоступних або потенційно небезпечних областей, які могли б стати ділянками майбутніх робіт з роботизованого освоєння Місяця.
У рамках програми автоматичних місій Chang'e Китай планує використання кількох роботизованих апаратів для різних функцій. У місії Chang'e-7, запланованій на середину 2020-х років, використовуватиметься стрибаючий робот (hopper), здатний досліджувати кратери на південному полюсі Місяця та шукати водні ресурси, а також великий ровер для переміщення поверхнею.
У перспективі місії Chang'e-8 очікується розміщення ще більш просунутих роботів, включаючи мультифункціональні платформи, здатні підтримувати наукові інструменти, інфраструктуру та автономні операції в складних умовах на Місяці. Частиною цієї ініціативи стане проєкт Hong Kong Operation Robot, розроблений за участі Hong Kong University of Science and Technology та орієнтований на комплексні завдання обслуговування та монтажу обладнання на поверхні.
Роботи стають незамінними помічниками людини в умовах, де небезпечно або неефективно працювати безпосередньо. Вони стають частиною ширшої стратегії з «роботизованого освоєння Місяця», що включає різні автоматизовані апарати для будівництва та експлуатації базових інфраструктурних систем. У рамках плану зі створення Місячної бази, яку Китай планує завершити до 2035–2050 років, роботизовані системи стануть ключовими елементами підготовки території, будівництва бази, обслуговування обладнання та дослідження ресурсів.