ispace 16 ноября представила окончательный проект своего микровездехода, который будет доставлен на поверхность Луны с помощью лунного посадочного модуля в рамках «Миссии 2».
Дизайн был представлен сегодня основателем и генеральным директором ispace Такеши Хакамадой во время пресс-конференции, состоявшейся в Токио.
Mission 2, являющаяся частью программы исследования Луны HAKUTO-R, станет второй технологической демонстрацией компании, основанной на уроках, извлеченных из первой миссии, целями которой являются дальнейшая проверка конструкции и технологии спускаемого аппарата, а также бизнес-модели ispace для предоставления надежного лунного транспорта и услуг передачи данных.

Во время Миссии 2 компания ispace проведет поверхностную разведку ресурсов, в первую очередь с помощью своего микровездехода, который проектируется, производится и собирается инженерами офиса ispace в Европе. Как заявляет ispace в пресс-релизе, опубликованном, на своем сайте, это должно стать важным этапом в достижении цели и видении ispace по созданию окололунной экономики.
HAKUTO-R Mission 2 Micro Rover
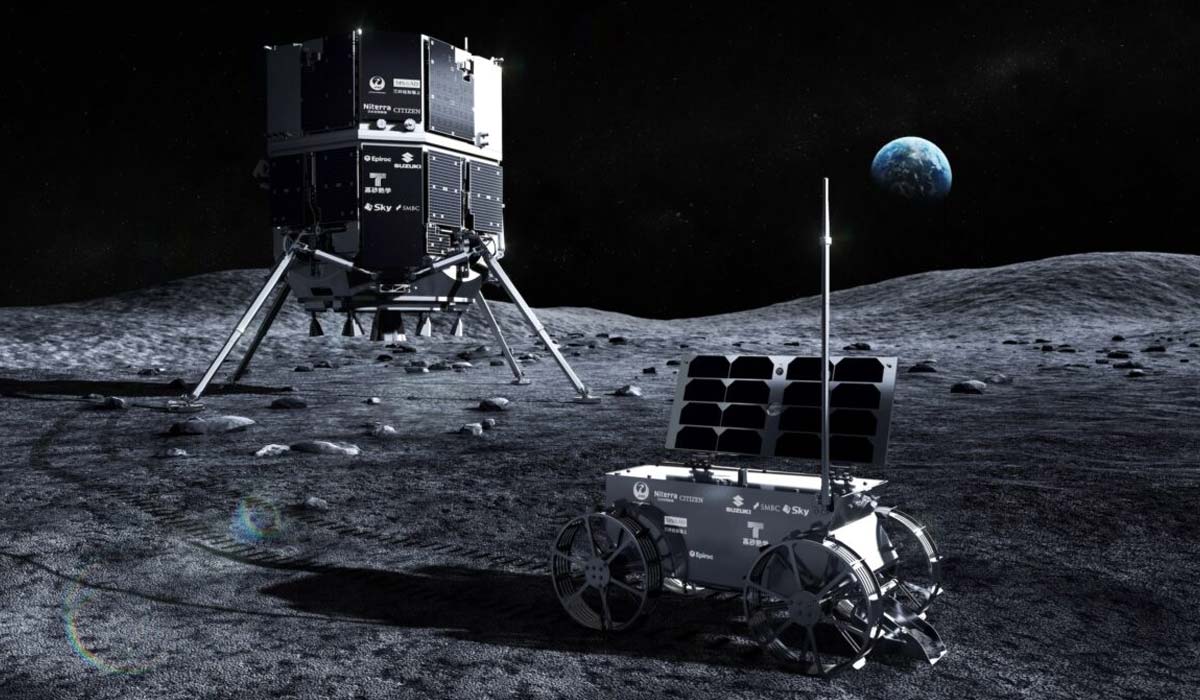
Микровездеход имеет высоту 26 см, ширину 31,5 см, длину 54 см и весит около 5 кг. Он будет храниться в отсеке полезной нагрузки в верхней части посадочного модуля и будет использовать специальный механизм для высадки на поверхность Луны после приземления спускаемого аппарата. Он спроектирован так, чтобы быть легким, с рамой из углепластика, чтобы выдерживать нагрузки при запуске ракеты и во время пути к лунной поверхности.
Ровер оснащен передней HD-камерой, которая может снимать изображения лунной поверхности. Колеса имеют такую форму, чтобы марсоход мог устойчиво перемещаться по лунному реголиту. Команды и данные будут отправляться и приниматься из центра управления полетами через посадочный модуль.

Исследование Луны в рамках Миссии 2 также внесет вклад в программу Artemis под руководством NASA. На передней части микровездехода будет установлен специальный ковш, разработанный компанией Epiroc AB. После высадки на лунную поверхность, операторы миссии планируют использовать ковш, чтобы собрать образцы лунного реголита и сфотографировать их с помощью камеры, установленной на марсоходе.
Микроровер разрабатывается при софинансировании Космического агентства Люксембурга в рамках контракта Европейского космического агентства с Национальной космической программой Люксембурга LuxIMPULSE. В настоящее время опытная модель разрабатывается в Люксембурге. После завершения экологических испытаний опытного образца начнется разработка летной модели. Планируется, что марсоход будет помещен в посадочный модуль в Японии летом 2024 года.
Разработка лунного модуля Mission 2 Lunar Lander
Лунный посадочный аппарат Миссии 2 будет иметь ту же общую конструкцию, что и посадочный модуль, использовавшийся во время Миссии 1, с использованием ее проверенных в ходе миссии характеристик. На основе окончательного анализа полетных данных HAKUTO-R Mission 1 в летную модель Миссии 2 будут включены улучшения, отражающие необходимую проверку программного обеспечения, расширение диапазона моделирования приземления и дополнительные полевые испытания датчиков приземления для дальнейшего улучшения точности миссии.
Инженеры ispace собирают летную модель на предприятии JAXA в Цукубе, Япония, с сентября 2023 года. Ожидается, что сборка летной модели будет завершена к весне 2024 года, после чего пройдут окончательные экологические испытания. Ожидается, что Миссия 2 будет запущена на ракете SpaceX Falcon 9 не ранее зимы 2024 года.