ispace 16 листопада представила остаточний проект свого мікровсюдихода, який буде доставлений на поверхню Місяця за допомогою місячного посадкового модуля в рамках «Місії 2».
Дизайн було представлено сьогодні засновником та генеральним директором ispace Такеші Хакамадою під час прес-конференції, що відбулася у Токіо.
Mission 2, що є частиною програми дослідження Місяця HAKUTO-R, стане другою технологічною демонстрацією компанії, заснованої на уроках, викладених з першої місії, метою якої є подальша перевірка конструкції та технології посадкового апарату, а також бізнес-моделі ispace для надання надійного місячного транспорту та послуг передачі даних.

Під час Місії 2 компанія ispace проведе поверхневу розвідку ресурсів, насамперед за допомогою свого мікровсюдихода, який проектується, виробляється та збирається інженерами офісу ispace у Європі. Як заявляє ispace у прес-релізі, опублікованому на своєму сайті, це має стати важливим етапом у досягненні мети та баченні ispace зі створення навколомісячної економіки.
HAKUTO-R Mission 2 Micro Rover
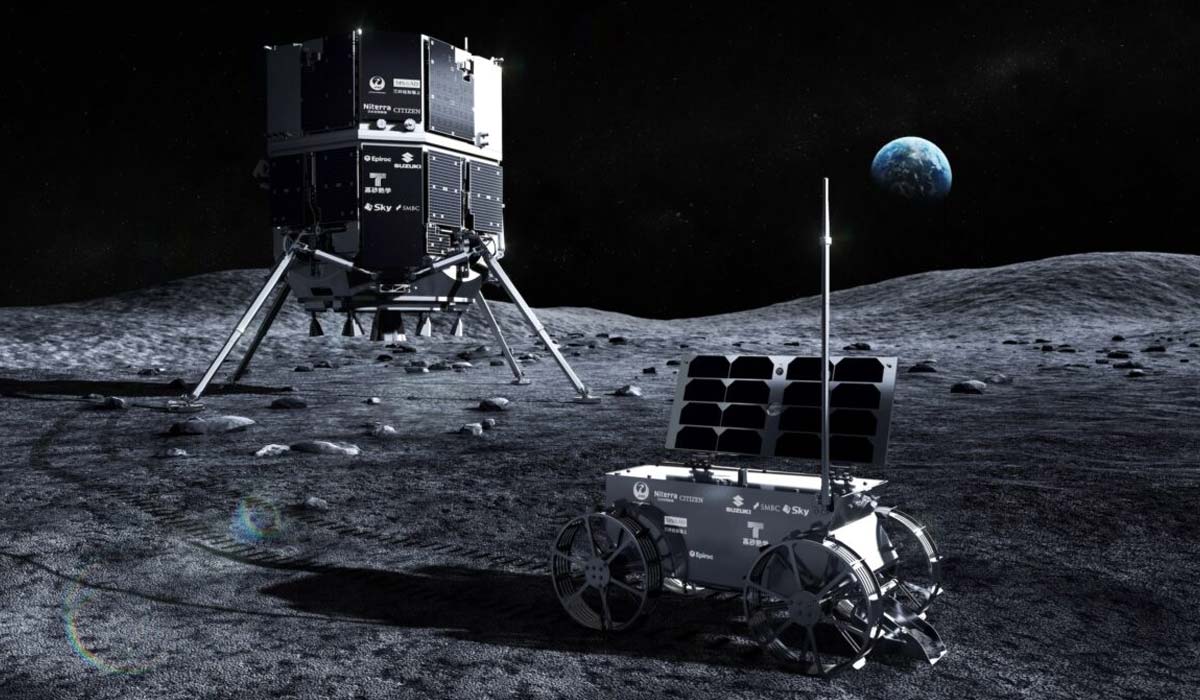
Мікровсюдихід має висоту 26 см, ширину 31,5 см, довжину 54 см і важить близько 5 кг. Він буде зберігатися у відсіку корисного навантаження у верхній частині посадкового модуля і використовуватиме спеціальний механізм для висадки на поверхню Місяця після приземлення апарату, що спускається. Він спроектований так, щоб бути легким, з рамою з вуглепластику, щоб витримувати навантаження під час запуску ракети та під час шляху до місячної поверхні.
Ровер оснащено передньою камерою HD, яка може знімати зображення місячної поверхні. Колеса мають таку форму, щоб марсохід міг стійко переміщатися місячним реголітом. Команди та дані будуть надсилатися та прийматися з центру управління польотами через посадковий модуль.

Дослідження Місяця в рамках Місії 2 також зробить внесок у програму Artemis під керівництвом NASA. На передній частині мікровсюдихода буде встановлений спеціальний ківш, розроблений компанією Epiroc AB. Після висадки на місячну поверхню оператори місії планують використовувати ківш, щоб зібрати зразки місячного реголіту та сфотографувати їх за допомогою камери, встановленої на марсоході.
Мікроровер розробляється за співфінансування Космічного агентства Люксембургу в рамках контракту Європейського космічного агентства з Національною космічною програмою Люксембургу LuxIMPULSE. В даний час досвідчена модель розробляється в Люксембурзі. Після завершення екологічних випробувань дослідного зразка розпочнеться розробка льотної моделі. Планується, що марсохід буде поміщений у посадковий модуль у Японії влітку 2024 року.
Розробка місячного модуля HAKUTO-R Mission 2 Lunar Lander
Місячний посадковий апарат Місії 2 матиме ту ж загальну конструкцію, що й посадковий модуль, що використовувався під час Місії 1, з використанням її перевірених у ході місії характеристик. На основі остаточного аналізу польотних даних HAKUTO-R Mission 1 до льотної моделі Місії 2 будуть включені покращення, що відображають необхідну перевірку програмного забезпечення, розширення діапазону моделювання приземлення та додаткові польові випробування датчиків приземлення для подальшого покращення точності місії.
Інженери ispace збирають льотну модель на підприємстві JAXA у Цукубі, Японія, з вересня 2023 року. Очікується, що складання льотної моделі буде завершено до весни 2024 року, після чого відбудуться остаточні екологічні випробування. Очікується, що Місія 2 буде запущена на ракеті SpaceX Falcon 9 не раніше зими 2024 року.