
NASA сообщает, что завершило строительство и испытания небольших лунных роверов CADRE, которые вместе составят карту лунной поверхности в качестве технологии, демонстрирующей возможности многороботных миссий.
Три небольших лунохода, которые будут исследовать Луну синхронно друг с другом, в настоящее время готовится к запуску. Инженеры Лаборатории реактивного движения NASA (JPL) недавно закончили сборку роботов, а затем подвергли их серии испытаний, чтобы убедиться, что они выдержат тряску во время полета на ракете в космос и работу в суровой лунной среде.
Роверы на солнечных батареях размером с чемодан для ручной клади являются частью демонстрационной технологии под названием CADRE (Cooperative Autonomous Distributed Robotic Exploration). Луноходы и сопутствующее оборудование будут установлены на посадочном аппарате, направляющемся в район гамма Рейнер на Луне. Они будут работать в течение лунного дня, что эквивалентно примерно 14 дням на Земле, и проведут эксперименты, автономно исследуя, картографируя и используя георадар, который заглянет под поверхность Луны.
Цель проекта — показать, что группа роботизированных космических аппаратов может работать вместе, выполняя задачи и собирая данные без явных команд от диспетчеров на Земле. Если проект окажется успешным, то в будущих миссиях команды роботов могут быть направлены на одновременное проведение распределенных научных измерений, в том числе и для поддержки астронавтов.
Инженеры потратили много времени на тестирование роверов и работу над ошибками, чтобы закончить аппаратуру, провести испытания и подготовить ее к интеграции с посадочным аппаратом.

Встряска и прожарка
Хотя список испытаний обширен, самые жестокие из них связаны с экстремальными условиями окружающей среды, чтобы гарантировать, что луноходы смогут выдержать суровые условия предстоящего пути. В частности, их помещают в термовакуумную камеру, которая имитирует безвоздушное пространство космоса с его экстремально жаркими и холодными температурами. Оборудование также закрепляется на специальном "трясущемся столе", который интенсивно вибрирует, чтобы убедиться, что оно выдержит путешествие за пределы земной атмосферы.
Инженеры также провели экологические испытания трех аппаратных элементов, установленных на посадочном аппарате — базовой станции, с которой луноходы будут связываться по радиоканалу, камеры, обеспечивающей обзор деятельности марсоходов, и системы развертывания, которая будет опускать марсоходы на лунную поверхность с помощью волоконного троса, медленно подаваемого с моторизованной катушки.
Испытание кода на прочность
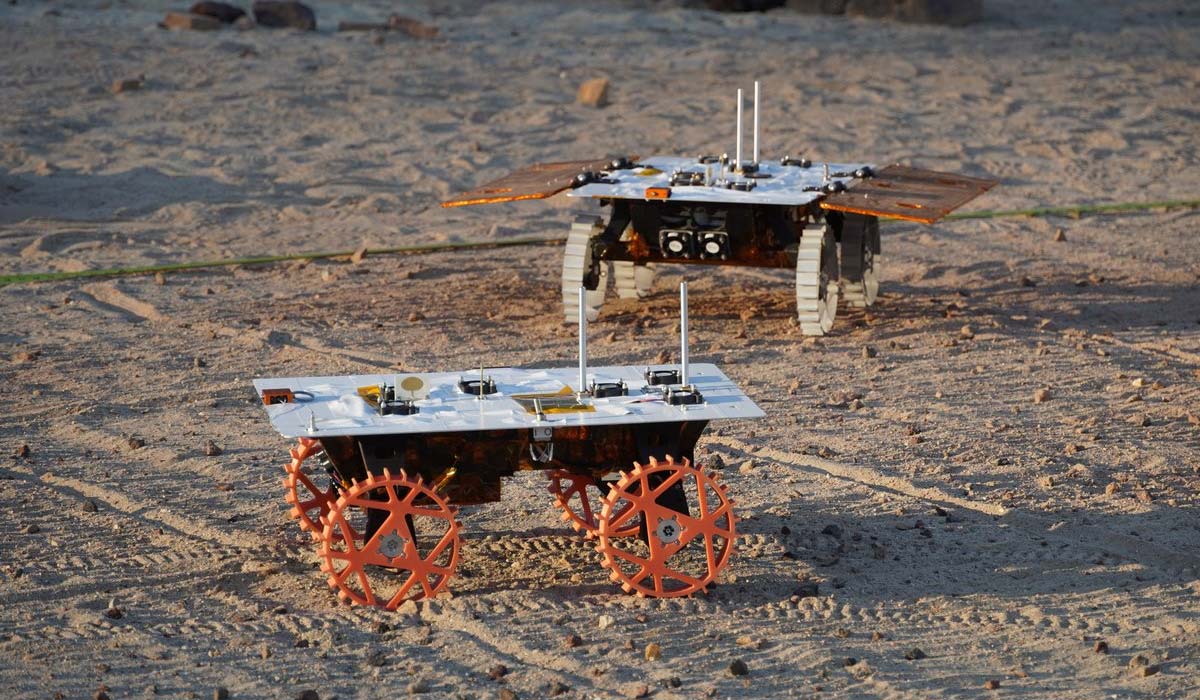
Тем временем инженеры, работающие над программным обеспечением CADRE для совместной автономной работы, провели много дней на каменистом и песчаном "марсианском" дворе JPL с полномасштабными моделями роверов. На тестовых моделях луноходов применялось полетное программное обеспечение и возможности автономной работы, и это показало, что роботы смогут достичь ключевых целей проекта. Столкнувшись с неожиданными препятствиями, они корректировали свои планы, обмениваясь обновленными картами и перепланируя согласованные маршруты. А когда у одного ровера заканчивался заряд батареи, вся команда приостанавливала движение, чтобы затем продолжить его вместе.
В рамках проекта было проведено несколько поездок ночью под большими мощными лампами, чтобы луноходы смогли испытать экстремальные тени и освещение, приближенные к тем, с которыми они столкнутся в лунное время суток.
После этого команда провела аналогичные испытания с полетными моделями в чистой комнате JPL. Когда безупречный пол оказался немного скользким — текстура отличалась от лунной поверхности — роботы выбились из строя. Но они остановились, приспособились и продолжили движение по намеченному пути.
Далее оборудование будет отправлено в компанию Intuitive Machines для установки на посадочный аппарат Nova-C, который будет запущен на ракете SpaceX Falcon 9 из Космического центра Кеннеди НАСА во Флориде.