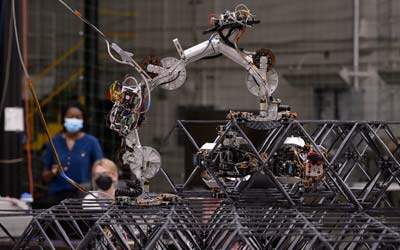
Китайські дослідники працюють над створенням шестиногих роботів майбутнього, прагнучи досягти якісного прориву в робототехніці для освоєння Місяця. Шестиногий робот забезпечує підвищену стійкість, більш плавний рух і чудову вантажопідйомність, повідомило в понеділок Центральне телебачення Китаю (CCTV).
Коли шестиногий робот іде, він піднімає три ноги одночасно, а інші три утворюють стійку трикутну основу для підтримки тіла. Це дає змогу роботу зберігати стійкість, навіть якщо одна нога пошкоджена.
«Тіло робота буде повністю керованим, з підвищеною стійкістю, плавними рухами і надійною несучою здатністю», - йдеться в доповіді Гао Фенга, професора Школи машинобудування Шанхайського університету Цзяо Тун, який відповідає за розробку робота.
«Для майбутніх розробок місячних роботів ми також створили інтегрований посадковий і крокуючий робот, щоб досягти значного прориву в технології освоєння Місяця», - сказав Гао.
Щоб прокласти шлях до Міжнародної місячної дослідницької станції (ILRS), Китайська програма освоєння Місяця передбачає ще два запуски, причому перший запуск заплановано на 2026 рік, повідомило у вересні Китайське національне космічне управління (CNSA).
План передбачає місію «Чан'є-7» у 2026 році, а потім місію «Чан'є-8» приблизно у 2028 році.
Місія «Чан'е-7» буде спрямована на дослідження довкілля і ресурсів Південного полюса Місяця, а «Чан'е-8» перевірить технології використання ресурсів на місці, що вкрай важливо для майбутнього будівництва Місяця. За словами Бянь Чжигана, заступника директора CNSA, ILRS планується створити до 2035 року.